Глобальная навигационная спутниковая система (ГЛОНАСС)
В 1976 году вышло постановление правительства СССР о ее разработке.
На основе проведенных многосторонних исследований отечественными специалистами была выбрана штатная орбитальная группировка из 24 спутников, находящихся на средневысотных околокруговых орбитах с номинальными значениями высоты — 19100 километров.
Летные испытания высокоорбитальной отечественной навигационной системы, получившей название ГЛОНАСС, были начаты 12 октября 1982 года с запуском первого космического аппарата серии «Глонасс» («Космос-1413»). 24 сентября 1993 года система была официально принята в эксплуатацию в интересах министерства обороны РФ с орбитальной группировкой ограниченного состава из 12 спутников. В декабре 1995 года орбитальная группировка была развернута до штатного состава (24 спутника), который необходим для полного охвата территории всего земного шара.
Сокращение финансирования космической отрасли в 1990-х годах привело к деградации орбитальной группировки ГЛОНАСС. К 2002 году она насчитывала только семь космических аппаратов, что не могло обеспечить территорию России навигационными сигналами системы ГЛОНАСС хотя бы с умеренной доступностью. Точностные характеристики уступали более чем на порядок американской системе навигации GPS.
В целях сохранения и развития системы президентом и правительством РФ был утвержден ряд директивных документов, основным из которых являлась федеральная целевая программа «Глобальная навигационная система» на период 2002-2012 годы.
В результате ее реализации орбитальная группировка была полностью восстановлена. С 2012 года система развивается в рамках новой федеральной целевой программы «Поддержание, развитие и использование системы ГЛОНАСС на 2012-2020 годы» для обеспечения эффективности решения задач координатно-временного и навигационного обеспечения в интересах обороны, безопасности и развития социально-экономической сферы страны в ближайшей и отдаленной перспективе.
Система ГЛОНАСС состоит из подсистемы космических аппаратов, подсистемы контроля и управления и навигационной аппаратуры потребителей.
Основой системы ГЛОНАСС являются 24 спутника, которые движутся в трех орбитальных плоскостях по восемь аппаратов в каждой плоскости, наклоненных к экватору под углом 64,8°, с высотой орбит 19100 километров и периодом обращения 11 часов 15 минут 44 секунды. Выбранная структура орбитальной группировки обеспечивает движение всех космических аппаратов по единой трассе на поверхности Земли с ее повторяемостью через восемь суток. Такие характеристики обеспечивают высокую устойчивость орбитальной группировки системы ГЛОНАСС, что практически позволяет обходиться без коррекции орбит космических аппаратов в течение всего срока их активного существования.
По состоянию на 10 октября 2017 года в составе орбитальной группировки ГЛОНАСС находилось 25 космических аппаратов, из них 23 использовались по целевому назначению.
Космические спутники для ГЛОНАСС были спроектированы в конструкторском бюро НПО прикладной механики (ныне — АО «Информационные спутниковые системы» имени академика М.Ф. Решетнева») в городе Красноярск-26 (Железногорск).
С 1982 года по 2009 год в эксплуатации находились космические аппараты «Глонасс», со сроком активного гарантийного существования три года. В настоящее время основу орбитальной группировки составляют спутники модифицированной серии «Глонасс-М», первый из которых был запущен в декабре 2003 года. От спутников первого поколения они отличаются гарантийным сроком активного существования (семь лет) и использованием импортных комплектующих. Планируется замена «Глонасс-М» космическими аппаратами нового поколения «Глонасс-К» со сроком активного существования до 10 лет. Первый космический аппарат этого типа был выведен на орбиту в 2011 году, второй — 2014 году.
В настоящее время в АО «ИСС» также ведется создание усовершенствованных навигационных спутников — «Глонасс-К» второго этапа.
Подсистема контроля и управления (ПКУ) состоит из Центра управления системой ГЛОНАСС и сети станций измерения, управления и контроля, рассредоточенной по всей территории России. В задачи ПКУ входит контроль правильности функционирования космических аппаратов, непрерывное уточнение параметров орбит и выдача на спутники временных программ, команд управления и навигационной информации.
Навигационная аппаратура потребителей состоит из навигационных приемников и устройств обработки, предназначенных для приема навигационных сигналов спутников ГЛОНАСС и вычисления собственных координат, скорости и времени. Навигационной аппаратурой потребителей системы ГЛОНАСС выполняются беззапросные измерения до четырех спутников ГЛОНАСС, а также прием и обработка навигационных сообщений. В навигационном сообщении описывается положение спутника в пространстве и времени. В результате обработки полученных измерений и принятых навигационных сообщений определяются три координаты потребителя, три составляющие вектора скорости его движения, а также осуществляется «привязка» шкалы времени потребителя к шкале Госэталона координированного всемирного времени UTC (SU).
Система ГЛОНАСС позволяет обеспечить непрерывную глобальную навигацию всех типов потребителей с различным уровнем требований к качеству навигационного обеспечения путем использования сигналов стандартной (L1) и высокой точности (L2) с вероятностью 0,95 при 18 спутниках и 0,997 при 24 спутниках в группировке. Она отнесена к космической технике двойного назначения.
В настоящее время развитием проекта ГЛОНАСС занимается Государственная корпорация «Роскосмос» и министерства и ведомства России: Минобороны, МВД, Ростехнадзор, Минтранс, Росреестр, Минпромторг, Росстандарт, Росавиация, Росморречфлот, Федеральное агентство научных организаций (ФАНО).
Летом 2017 года руководитель Федерального агентства по техническому регулированию и метрологии (Росстандарт) Алексей Абрамов заявил, что российские ученые работают над увеличением точности навигаторов ГЛОНАСС до нескольких сантиметров. По его словам, пока достигнут метровый диапазон (при благоприятных условиях можно определять место нахождения того или иного объекта с точностью до 3-5 метров).
В сентябре 2017 года вице-премьер Дмитрий Рогозин отметил, что российская система ГЛОНАСС в два раза уступает американской GPS. Президент РФ Владимир Путин на заседании комиссии военно-промышленного комплекса поставил задачу сравнять эффективность GPS и ГЛОНАСС и к 2020 году выйти на конкурентные показатели. По словам Рогозина, это удастся сделать, благодаря запуску новых аппаратов.
В соответствии с указом президента РФ доступ к гражданским навигационным сигналам системы ГЛОНАСС предоставляется как российским, так и иностранным потребителям на безвозмездной основе и без ограничений.
С 1996 года по предложению правительства РФ ГЛОНАСС наряду с американской GPS используется Международной морской организацией и Международной организацией гражданской авиации.
Современные средства спутниковой навигации уже сейчас широко используются в различных областях социально-экономической сферы и позволяют выполнять навигацию наземных, воздушных, морских, речных и космических средств, управление транспортными потоками на всех видах транспорта, контроль перевозок ценных и опасных грузов, контроль рыболовства в территориальных водах, поисково-спасательные операции, мониторинг окружающей среды; геодезическую съемку и определение местоположения географических объектов с сантиметровой точностью при прокладке нефте- и газопроводов, линий электропередач, в строительстве; синхронизацию в системах связи, телекоммуникаций и электроэнергетике; решение фундаментальных геофизических задач; персональную навигацию индивидуальных потребителей.
Спутниковая навигация уже применяется и в сельском хозяйстве, где используется для автоматической обработки земельных угодий комбайнами, и в горнодобывающей промышленности. Круг применения технологий спутниковой навигации постоянно расширяется.
Материал подготовлен на основе информации РИА Новости и открытых источников
ГЛОНАСС — Российские космические системы

Глобальное навигационно-временное обеспечение неограниченного количества потребителей на земле, на море, в воздухе и в космосе. Доступ к гражданским сигналам системы предоставляется как российским, так и иностранным потребителям на безвозмездной основе без ограничений. ГЛОНАСС — российская спутниковая система навигации, одна из двух существующих в мире систем, принятых в эксплуатацию. Позволяет в абсолютно любой точке Земного шара, а также в космическом пространстве вблизи планеты определять местоположение и скорость объектов.
Принцип работы системы основан на измерении расстояния от объекта, координаты которого необходимо получить, до спутников, расположение которых известно с большой точностью. Таблица расположений называется альманахом. Полный альманах содержится в радиосигнале каждого спутника. Таким образом, зная расстояния до нескольких спутников системы, с помощью обычных геометрических построений, на основе альманаха, можно вычислить положение объекта в пространстве.
Метод измерения расстояния от спутника до антенны приёмника основан на определённости скорости распространения радиоволн. Для осуществления измерения распространяемого радиосигнала, каждый спутник навигационной системы излучает сигналы точного времени, используя синхронизированные с системным временем атомные часы. При работе спутникового приёмника его часы синхронизируются с системным временем, и при дальнейшем приёме сигналов вычисляется задержка между временем излучения, содержащемся в самом сигнале, и временем приёма сигнала. Располагая этой информацией, навигационный приёмник вычисляет координаты антенны. Все остальные параметры движения (скорость, курс, пройденное расстояние) вычисляются на основе измерения времени, которое объект затратил на перемещение между двумя или более точками с определёнными координатами.
Основу орбитальной группировки в трёх орбитальных плоскостях составляют космические аппараты «Глонасс-М» и космические аппараты нового поколения «Глонасс-К».
Развитием проекта управляют Госкорпорация «Роскосмос» и АО «Российские космические системы», головная организация по ГЛОНАСС.
russianspacesystems.ru
Спутниковые навигационные системы
В настоящее время в мире, помимо глобальных навигационных спутниковых систем ГЛОНАСС (Россия) и GPS (США), работы по развертыванию ГНСС БЕЙДОУ и ГАЛИЛЕО проводят Китай и страны Европейского союза. Япония и Индия разворачивают региональные навигационные спутниковые системы QZSS и IRNSS соответственно.
История развития ГНСС
Глобальные навигационные спутниковые системы
Архитектура штатных орбитальных группировок
|
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
ведутся НИР в рамках ФЦП | нет | ведутся НИР в рамках программы EGEP (2-е поколение) |
| ||||||||||||||||||||||||||||||||||||||||||||||
ведутся НИР в рамках ФЦП | нет | ведутся НИР в рамках программы EGEP (2-е поколение) |
| ||||||||||||||||||||||||||||||||||||||||||||||
Региональные навигационные спутниковые системы
Архитектура штатных орбитальных группировокКвазизенитный сегмент
| Геосинхронный сегмент
| ||||||||||||||||||||
|
|
www.glonass-iac.ru
Спутниковая навигация: GPS, ГЛОНАСС и другие
На смену бумажным картам местности пришли карты электронные, навигация по которым осуществляется с помощью спутниковой системы GPS. Из данной статьи вы узнаете, когда появилась спутниковая навигация, что представляет из себя сейчас и что ждет ее в ближайшем будущем.
Первые предпосылки
Во время Второй мировой войны у флотилий США и Великобритании появился весомый козырь – навигационная система LORAN, использующая радиомаяки. По окончанию боевых действий технологию в свое распоряжение получили гражданские суда «про-западных» стран. Спустя десятилетие СССР ввела в эксплуатацию свой ответ – навигационная система «Чайка», основанная на радиомаяках, используется по сей день.
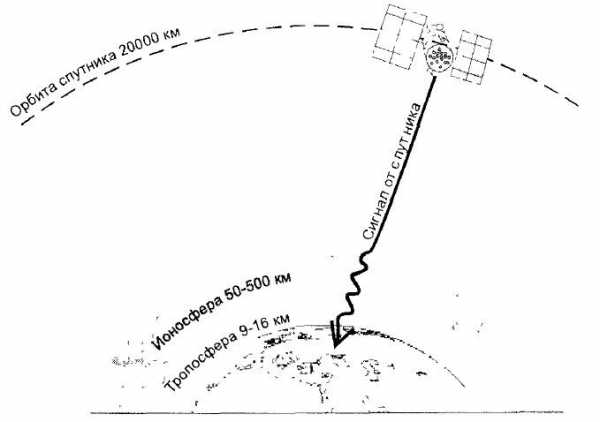
Навигационный радиомаяк LORAN в КанадеНо у наземной навигации есть существенные недостатки: неровности земного рельефа становятся преградой, а влияние ионосферы негативно сказывается на времени передачи сигнала. Если между навигационным радиомаяком и судном слишком большое расстояние, погрешность определения координат может измеряться километрами, что недопустимо.
На смену наземным радиомаякам пришли спутниковые навигационные системы для военных целей, первая из которых – американская Transit (другое название NAVSAT) – была запущена в 1964 году. Шесть низкоорбитальных спутников обеспечивали точность определения координат до двух сотен метров.
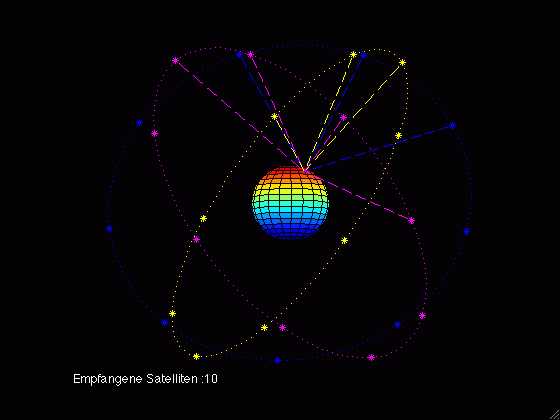
Сеть навигационных спутников вокруг ЗемлиВ 1976 году СССР запустила аналогичную военную навигационную систему «Циклон», а через три года – еще и гражданскую под названием «Цикада». Большим недостатком ранних систем спутниковой навигации было то, что пользоваться ими можно было лишь короткое время на протяжении часа. Низкоорбитальные спутники, да еще и в малом количестве, были не способны обеспечить широкое покрытие сигнала.
GPS vs. ГЛОНАСС
В 1974 году армия США вывела на орбиту первый спутник новой в то время системы навигации NAVSTAR, которую позже переименовали в GPS (Global Positioning System). В середине 1980-х технологию GPS разрешили использовать гражданским кораблям и самолетам, но на протяжении длительного времени им было доступно в разы менее точное позиционирование, чем военным. Двадцать четвертый спутник GPS, последний требовавшийся для полного покрытия поверхности Земли, запустили в 1993 году.
В 1982 году свой ответ представила СССР – им стала технология ГЛОНАСС (Глобальная навигационная спутниковая система). Завершающий 24-й спутник ГЛОНАСС вышел на орбиту в 1995 году, но малый срок эксплуатации спутников (три-пять лет) и недостаточное финансирование проекта почти на десятилетие вывели систему из строя. Восстановить всемирное покрытие ГЛОНАСС удалось только в 2010 году.
ГЛОНАСС – изначально советская, а теперь российская альтернатива GPSЧтобы избежать подобных сбоев, и GPS, и ГЛОНАСС сейчас используют 31 спутник: 24 основных и 7 резервных, как говорится, на всякий «пожарный» случай. Летают современные навигационные спутники на высоте порядка 20 тыс. км и за сутки успевают дважды облететь Землю.
Принцип работы GPS
Позиционирование в сети GPS проводится путем измерения расстояния от приемника до нескольких спутников, местоположение которых в текущий момент времени точно известно. Расстояние до спутника измеряется путем умножения задержки сигнала на скорость света.
Связь с первым спутником дает информацию лишь о сфере возможных расположений приемника. Пересечение двух сфер даст окружность, трех – две точки, а четырех – единственно верную точку на карте. В роли одной из сфер чаще всего используют нашу планету, что позволяет вместо четырех спутников позиционироваться только по трем. В теории точность позиционирования GPS может достигать 2 метров (на практике же погрешность значительно больше).
Каждый спутник отправляет приемнику большой набор информации: точное время и его поправку, альманах, данные эфемерид и параметры ионосферы. Сигнал точного времени требуется для измерения задержки между его отправкой и приемом.
Навигационные спутники оснащаются высокоточными цезиевыми часами, тогда как приемники – куда менее точными кварцевыми. Поэтому для проверки времени осуществляется контакт с дополнительным (четвертым) спутником.
Навигационный чип производства компании LeadtekНо ошибаться могут и цезиевые часы, поэтому их сверяют с размещенными на земле водородными часами. Для каждого спутника в центре управления системой навигации индивидуально рассчитывается поправка времени, которая впоследствии вместе с точным временем отправляется приемнику.
Еще одним важным компонентом системы спутниковой навигации является альманах, который представляет собой таблицу параметров орбит спутников на месяц вперед. Альманах, как и поправка времени, рассчитываются в центре управления.
Туристический навигатор Garmin eTrex 10Передают спутники и индивидуальные данные эфемерид, на основе которых вычисляются отклонения орбиты. А учитывая что скорость света нигде кроме вакуума не постоянна, в обязательном порядке учитывается задержка сигнала в ионосфере.
Передача данных в сети GPS ведется строго на двух частотах: 1575,42 МГц и 1224,60 МГц. Разные спутники транслируют сигнал на одной и той же частоте, но используют кодовое разделение каналов CDMA. То есть сигнал спутника – всего лишь шум, раскодировать который можно только при наличии соответствующего PRN-кода.
 Автомобильный навигатор NAVIGON 3300 Max
Автомобильный навигатор NAVIGON 3300 MaxВышеописанный подход позволяет обеспечить высокую помехоустойчивость и использовать узкий частотный диапазон. Тем нее менее, иногда GPS-приемникам все равно приходится подолгу искать спутники, что вызвано рядом причин.
Во-первых, приемник изначально не знает, где находится спутник, удаляется он или приближается и какое смещение частоты его сигнала. Во-вторых, контакт со спутником считается удачным только тогда, когда от него получен полный набор информации. Скорость же передачи данных в сети GPS редко превышает показатель 50 бит/с. А стоит сигналу оборваться из-за радиопомех, как поиск начинается заново.
Запущенный в этом году экспериментальный GPS-спутник USA-242 может похвастаться длительным временем работы (более 10 лет) и более точным позиционированием (до полуметра)Будущее спутниковой навигации
Сейчас GPS и ГЛОНАСС широко применяются в мирных целях и, по сути, являются взаимозаменяемыми. Новейшие навигационные чипы поддерживают оба стандарта связи и подключаются к тем спутникам, которые находят первыми.
Американская GPS и российская ГЛОНАСС – далеко не единственные в мире системы спутниковой навигации. К примеру, Китай, Индия и Япония начали развертывать собственные ССН под названием BeiDou, IRNSS и QZSS соответственно, которые будут действовать только внутри своих стран, а потому потребуют сравнительно малого количества спутников.
Но самый большой интерес, пожалуй, вызывает проект Galileo, который разрабатывается Европейским союзом и должен быть запущен на полную мощность до 2020 года. Изначально Galileo задумывалась как сугубо европейская сеть, но о своем желании поучаствовать в ее создании уже заявили страны Ближнего Востока и Южной Америки. Так что в скором времени на рынке глобальных ССН может появиться «третья сила». Если и эта система будет совместима с существующими, а скорей всего так и будет, потребители только выиграют – скорость поиска спутников и точность позиционирования должны вырости.
itc.ua
Принципы спутниковой навигации
Космический сегмент
Космический сегмент, состоящий из навигационных спутников, представляет собой совокупность источников радионавигационных сигналов, передающих одновременно значительный объем служебной информации. Основные функции каждого спутника — формирование и излучение радиосигналов, необходимых для навигационных определений потребителей и контроля бортовых систем спутника.
Наземный сегмент
В состав наземного сегмента входят космодром, командно-измерительный комплекс и центр управления. Космодром обеспечивает вывод спутников на требуемые орбиты при первоначальном развертывании навигационной системы, а также периодическое восполнение спутников по мере их выхода из строя или выработки ресурса. Главными объектами космодрома являются техническая позиция и стартовый комплекс. Техническая позиция обеспечивает прием, хранение и сборку ракет-носителей и спутников, их испытания, заправку и состыковку. В число задач стартового комплекса входят: доставка носителя с навигационным спутником на стартовую площадку, установка на пусковую систему, предполетные испытания, заправка носителя, наведение и пуск.
Командно-измерительный комплекс служит для снабжения навигационных спутников служебной информацией, необходимой для проведения навигационных сеансов, а также для контроля и управления ими как космическими аппаратами.
Центр управления, связанный информационными и управляющими радиолиниями с космодромом и командно-измерительным комплексом, координирует функционирование всех элементов спутниковой навигационной системы.
Пользовательский сегмент
В пользовательский сегмент входит аппаратура потребителей. Она предназначается для приема сигналов от навигационных спутников, измерения навигационных параметров и обработки измерений. Для решения навигационных задач в аппаратуре потребителя предусматривается специализированный встроенный компьютер. Разнообразие существующей аппаратуры потребителей обеспечивает потребности наземных, морских, авиационных и космических (в пределах ближнего космоса) потребителей.
Современная спутниковая навигация основывается на использовании принципа беззапросных дальномерных измерений между навигационными спутниками и потребителем. Это означает, что потребителю передается в составе навигационного сигнала информация о координатах спутников. Одновременно (синхронно) производятся измерения дальностей до навигационных спутников. Способ измерений дальностей основывается на вычислении временных задержек принимаемого сигнала от спутника по сравнению с сигналом, генерируемым аппаратурой потребителя.
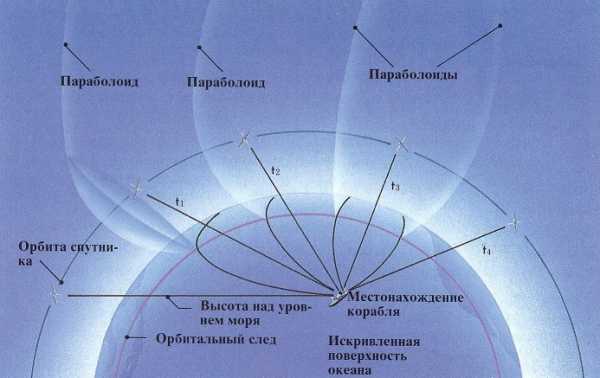
На рисунке приведена схема определений местоположения потребителя с координатами x, y, z на основе измерений дальности до четырех навигационных спутников. Цветными яркими линиями показаны окружности, в центре которых расположены спутники. Радиусы окружностей соответствуют истинным дальностям, т.е. истинным расстояниям между спутниками и потребителем. Цветные неяркие линии – это окружности с радиусами, соответствующими измеренным дальностям, которые отличаются от истинных и поэтому называются псевдодальностями. Истинная дальность отличается от псевдодальности на величину, равную произведению скорости света на уход часов b, т.е. величину смещения часов потребителя по отношению к системному времени. На рисунке показан случай, когда уход часов потребителя больше нуля – то есть часы потребителя опережают системное время, поэтому измеренные псевдодальности меньше истинных дальностей.
В идеальном варианте, когда измерения производятся точно и показания часов спутников и потребителя совпадают для определения положения потребителя в пространстве достаточно произвести измерения до трех навигационных спутников.
В действительности показания часов, которые входят в состав навигационной аппаратуры потребителя, отличаются от показаний часов на борту навигационных спутников. Тогда для решения навигационной задачи к неизвестным ранее параметрам (три координаты потребителя) следует добавить еще один — смещение между часами потребителя и системным временем. Отсюда следует, что в общем случае для решения навигационной задачи потребитель должен «видеть», как минимум, четыре навигационных спутника.
Для функционирования навигационных спутниковых систем необходимы данные о параметрах вращения Земли, фундаментальные эфемериды Луны и планет, данные о гравитационном поле Земли, о моделях атмосферы, а также высокоточные данные об используемых системах координат и времени.
Геоцентрические системы координат — системы координат, начало которых совпадает с центром масс Земли. Их также называют общеземными или глобальными.
Для построения и поддержания общеземных систем координат используются четыре основных метода космической геодезии:
- радиоинтерферометрия со сверхдлинной базой (РСДБ),
- лазерная локация космических аппаратов (SLR),
- доплеровские измерительные системы (DORIS),
- навигационные измерения космических аппаратов ГЛОНАСС и других ГНСС.
Международная земная система координат ITRF является эталоном земной системы координат.
В современных навигационных спутниковых системах используются различные, как правило национальные, системы координат.
| Навигационная система | Система координат |
|---|---|
| Система координат ГЛОНАСС | ПЗ-90 (Параметры Земли 1990 года) |
| Система координат GPS | WGS-84 (World Geodetic System) |
| Система координат ГАЛИЛЕО | GTRF (Galileo Terrestrial Referenfce Frame) |
| Система координат БЕЙДОУ | CGCS2000 (China Geodetic Coordinate System 2000) |
| Система координат QZSS | JGS (Japanese geodetic system) |
| Система координат NavIC | WGS-84 (World Geodetic System) |
В соответствии с решаемыми задачами применяются два типа систем времени: астрономические и атомные.
Системы астрономического времени основаны на суточном вращении Земли. Эталоном для построения шкал астрономического времени служат солнечные или звездные сутки, в зависимости от точки небесной сферы, по которой производится измерение времени.
Всемирное время UT (Universal Time) – это среднее солнечное время на гринвическом меридиане.
Всемирное координированное время UTC синхронизировано с атомным временем и является международным стандартом, на котором базируется гражданское время.
Атомное время (TAI) — время, в основу измерения которого положены электромагнитные колебания, излучаемые атомами или молекулами при переходе из одного энергетического состояния в другое. В 1967 году на Генеральной конференции мер и весов атомная секунда представляет собой переход между сверхтонкими уровнями F=4, M=0 и F=3, M=0 основного состояния 2S1/2 атома цезия-133, не возмущённого внешними полями, и что частоте этого перехода приписывается значение 9 192 631 770 Герц.
Спутниковая радионавигационная система является пространственно-временной системой с зоной действия, охватывающей всё околоземное пространство, и функционирует в собственном системном времени. Важное место в ГНСС отводится проблеме временной синхронизации подсистем. Временная синхронизация важна и для обеспечения заданной последовательности излучения сигналов всех навигационных спутников. Она обусловливает возможность применения пассивных дальномерных (псевдодальномерных) методов измерений. Наземный командно-измерительный комплекс обеспечивает синхронизацию шкал времени всех навигационных КА путем их сверки и коррекции (непосредственной и алгоритмической).
Навигационных радиосигналы
При выборе типов и параметров сигналов, используемых в спутниковых радионавигационных системах, учитывается целый комплекс требований и условий. Сигналы должны обеспечивать высокую точность измерения времени прихода (задержки) сигнала и его доплеровской частоты и высокую вероятность правильного декодирования навигационного сообщения. Также сигналы должны иметь низкий уровень взаимной корреляции для того, чтобы сигналы разных навигационных космических аппаратов надежно различались навигационной аппаратурой потребителей. Кроме того, сигналы ГНСС должны максимально эффективно использовать отведенную полосу частот при малом уровне внеполосного излучения, обладать высокой помехоустойчивостью.
Почти все существующие навигационные спутниковые системы, за исключением индийской системы NAVIC, используют для передачи сигналов диапазон L. Система NAVIC будет излучать сигналы дополнительно и в S диапазоне.
Диапазоны, занимаемые различными навигационными спутниковыми системами
Виды модуляции
По мере развития спутниковых навигационных систем изменялись используемые виды модуляции радиосигналов.
В большинстве навигационных систем изначально использовались исключительно сигналы с бинарной (двухпозиционной)
фазовой модуляцией – ФМ-2 (BPSK). В настоящее время в спутниковой навигации начался переход к новому классу модулирующих функций,
получивших название BOC (Binary Offset Carrier)-сигналов.
Принципиальное отличие BOC-сигналов от сигналов с ФМ-2 состоит в том, что символ модулирующей ПСП BOC-сигнала представляет собой не прямоугольный видеоимпульс, а отрезок меандрового колебания, включающий в себя некоторое постоянное число периодов k. Поэтому сигналы с BOC-модуляцией часто называют меандровыми шумоподобными сигналами.
Использование сигналов с BOC-модуляцией повышает потенциальную точность измерения и разрешающую способность по задержке. Одновременно с этим, уменьшается уровень взаимных помех при совместном функционировании навигационных систем, использующих традиционные и новые сигналы.
Каждый спутник принимает с наземных станций управления навигационную информацию, которая передается обратно пользователям в составе навигационного сообщения. Навигационное сообщение содержит разные типы информации, необходимые для того, чтобы определить местоположение пользователя и синхронизовать его шкалу времени с национальным эталоном.
Типы информации навигационного сообщения
- Эфемеридная информация, необходимая для вычисления координат спутника с достаточной точностью
- Погрешность расхождения бортовой шкалы времени относительно системной шкалы времени для учета смещения времени космического аппарата при навигационных измерениях
- Расхождение между шкалой времени навигационной системы и национальной шкалой времени, для решения задачи синхронизации потребителей
- Признаки пригодности с информацией о состоянии спутника для оперативного исключения спутников с выявленными отказами из навигационного решения
- Альманах с информацией об орбитах и состоянии всех аппаратов в группировке для долгосрочного грубого прогноза движения спутников и планирования измерений
- Параметры модели ионосферы, необходимые одночастотным приемникам для компенсации погрешностей навигационных измерений, связанных с задержкой распространения сигналов в ионосфере
- Параметры вращения Земли для точного пересчета координат потребителя в разных системах координат
Признаки пригодности обновляются в течение нескольких секунд при обнаружении отказа. Параметры эфемерид и времени, как правило, обновляются не чаще, чем раз в полчаса. При этом период обновления для разных систем сильно отличается и может достигать четырех часов, в то время как альманах обновляется не чаще, чем раз в день.
По своему содержанию навигационное сообщение подразделяется на оперативную и неоперативную информацию и передается в виде потока цифровой информации (ЦИ).
Изначально во всех навигационных спутниковых системах использовалась структура вида «суперкадр/кадр/строка/слово». При этой структуре поток ЦИ формируется в виде непрерывно повторяющихся суперкадров,
суперкадр состоит из нескольких кадров, кадр состоит из нескольких строк.
В соответствии со структурой «суперкадр/кадр/строка/слово» формировались сигналы системы БЕЙДОУ, ГАЛИЛЕО (кроме E6), GPS (LNAV данные, L1), сигналы ГЛОНАСС с частотным разделением.
В зависимости от системы, размеры суперкадров, кадров и строк могут отличаться, но принцип формирования остается похожим.
Сейчас в большинстве сигналов используется гибкая строковая структура. В этой структуре навигационное сообщение формируется в виде переменного потока строк различных типов. Каждый тип строки имеет свою уникальную структуру и содержит определённый тип информации (указаны выше). НАП выделяет из потока очередную строку, определяет её тип и в соответствии с типом выделяет информацию, содержащуюся в этой строке.
Гибкая строковая структура навигационного сообщения позволяет значительно более эффективно использовать пропускную способность канала передачи данных.
Но главным достоинством навигационного сообщения с гибкой строковой структурой является возможность её эволюционной
модернизации при соблюдении принципа обратной совместимости. Для этого в ИКД для разработчиков НАП специально указывается,
что если НАП в навигационном сообщении встречает строки неизвестных ей типов, то она должна их игнорировать. Это позволяет добавлять
в процессе модернизации ГНСС к ранее существовавшим типам строк строки с новыми типами. НАП, выпущенная ранее, игнорирует строки с новыми типами и,
следовательно, не использует те новации, которые вводятся в процессе модернизации ГНСС, но при этом её работоспособность не нарушается.
Сообщения сигналов ГЛОНАСС с кодовым разделением имеют строковую структуру.
На точность определения потребителем своих координат, скорости движения и времени влияет множество факторов, которые можно разделить на категории:
- Системные погрешности, вносимые аппаратурой космического комплекса
Погрешности, связанные с функционированием бортовой аппаратуры спутника и наземного комплекса управления ГНСС обусловлены в основном несовершенством частотно-временного и эфемеридного обеспечения.
- Погрешности, возникающие на трассе распространения сигнала от космического аппарата до потребителя
Погрешности обусловлены отличием скорости распространения радиосигналов в атмосфере Земли от скорости их распространения в вакууме, а также зависимостью скорости от физических свойств различных слоёв атмосферы.
- Погрешности, возникающие в аппаратуре потребителя
Аппаратурные погрешности подразделяются на систематическую погрешность аппаратурной задержки радиосигнала в АП и флуктуационные погрешности, обусловленные шумами и динамикой потребителя.
Кроме того, на точность навигационно-временного определения существенно влияет взаимное расположение навигационных спутников и
потребителя.
Количественной характеристикой погрешности определения местоположения и поправки показаний часов, связанной с особенностями пространственного положения спутника и потребителя, служит так
называемый геометрический фактор ΓΣ или коэффициент геометрии. В англоязычной литературе используется обозначение GDOP — Geometrical delusion of precision.
Геометрический фактор ΓΣ показывает, во сколько раз происходит уменьшение точности измерений и зависит от следующих параметров:
- Гп — геометрический фактор точности определения местоположения потребителя ГНСС в пространстве.
Соответствует PDOP — Position delusion of precision. - Гг — геометрический фактор точности определения местоположения потребителя ГНСС по горизонтали.
Соответствует HDOP — Horizontal delusion of precision. - Гв — геометрический фактор точности определения местоположения потребителя ГНСС по вертикали.
Соответствует VDOP — Vertical delusion of precision. - Гт — геометрический фактор точности определения поправки показаний часов потребителя ГНСС.
Соответствует TDOP — Time delusion of precision.
Существующие в настоящее время глобальные навигационные спутниковые системы (ГНСС) GPS и ГЛОНАСС позволяют удовлетворить потребности в навигационном обслуживании обширный круг потребителей. Но существует ряд задач, которые требуют высоких точностей навигации. К этим задачам относятся: взлет, заход на посадку и посадка самолетов, судовождение в прибрежных водах, навигация вертолетов и автомобилей и другие.
Классическим методом повышения точности навигационных определений является использование дифференциального (относительного) режима определений.
Дифференциальный режим предполагает использование одного или более базовых приёмников, размещённых в точках с известными координатами, которые одновременно с приёмником потребителя (подвижным, или мобильным) осуществляют приём сигналов одних и тех же спутников.
Повышение точности навигационных определений достигается за счёт того, что ошибки измерения навигационных параметров потребительского и базовых приёмников являются коррелированными. При формировании разностей измеряемых параметров большая часть таких погрешностей компенсируется.
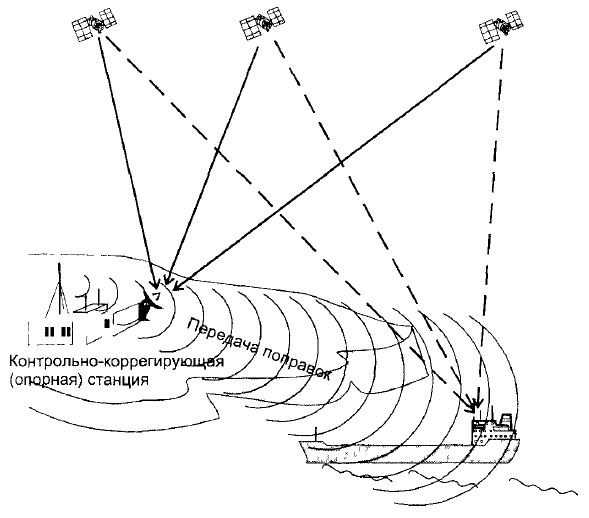
В основе дифференциального метода лежит знание координат опорной точки – контрольно-корректирующей станции (ККС) или системы опорных станций, относительно которых могут быть вычислены поправки к определению псевдодальностей до навигационных спутников. Если эти поправки учесть в аппаратуре потребителя, то точность расчета, в частности, координат может быть повышена в десятки раз.
Для обеспечения дифференциального режима для большого региона – например, для России, стран Европы, США — передача корректирующих дифференциальных поправок осуществляется при помощи геостационарных спутников. Системы, реализующие такой подход, получили название широкозонные дифференциальные системы.
Подробнее о системах функциональных дополнений ГНСС, которые предоставляют потребителям дополнительную корректирующую информацию, смотрите в разделе «Функциональные дополнения».
Наверхwww.glonass-iac.ru
какие бывают системы, параметры и функции / Promwad corporate blog / Habr
В этой статье мы расскажем про глобальные системы позиционирования, разработанные в США, России, ЕС и Китае; объясним, как поддержка технологий глобальной спутниковой навигации реализована в электронных устройствах, а также опишем ключевые и дополнительные функции современных навигационных приемников.
GPS
Система GPS (Global Positioning System) создавалась для применения в военных целях. Она начала работать в конце 80-х — начале 90-х годов, однако до 2000 года искусственные ограничения на определение местоположения существенно сдерживали ее возможности использования в гражданских целях.
После отмены ограничений на точность определения координат ошибка снизилась со 100 до 20 м (в последних поколениях GPS-приёмников при идеальных условиях ошибка не превышает 2 м). Такие условия позволили использовать систему для широкого круга общих и специальных задач:
- Определение точного местоположения
- Навигация, движение по маршруту с привязкой к карте на основании реального местоположения
- Синхронизация времени
Орбиты спутников системы GPS. Пример видимости спутников из одной из точек на поверхности Земли. Visible sat — это число спутников, видимых над горизонтом наблюдателя в идеальных условиях (чистое поле).
ГЛОНАСС
Российский аналог GPS — ГЛОНАСС (глобальная навигационная спутниковая система) — была развёрнута в 1995 году, но в связи с недостаточным финансированием и малым сроком службы спутников она не получила широкого распространения. Вторым рождением системы можно считать 2001 год, когда была принята целевая программа ее развития, благодаря которой ГЛОНАСС возобновил полноценную работу в 2010 году.
Сегодня на орбите работают 24 спутника ГЛОНАСС, они охватывают навигационным сигналом весь земной шар.
Новейшие потребительские устройства используют GPS и ГЛОНАСС как взаимодополняющие системы, подключаясь к ближайшим найденным спутникам, это значительно увеличивает скорость и точность их работы.

Пример: aвтомобильное GPS/ГЛОНАСС-навигационно-связное устройство на базе ОС Android, разработанное командой Promwad по заказу российского конструкторского бюро. Реализована поддержка GSM/GPRS/3G. Устройство автоматически обновляет информацию о дорожной обстановке в режиме реального времени и предлагает водителю оптимальный маршрут с учётом загруженности дорог.
Сейчас на стадии разработки находятся еще две спутниковые системы: европейская Galileo и китайская Compass.
Galileo
Галилео — совместный проект Европейского союза и Европейского космического агентства, анонсированный в 2002 году. Изначально рассчитывали, что уже в 2010 году в рамках этой системы на средней околоземной орбите будут работать 30 спутников. Но этот план не был реализован. Сейчас предположительной датой начала эксплуатации Galileo считается 2014 год. Однако ожидается, что полнофункциональное использование системы начнется не ранее 2020 года.
Compass
Это следующая ступень развития китайской региональной навигационной системы Beidou, которая была введена в эксплуатацию после запуска 10 спутников в конце 2011 года. Сейчас она обеспечивает покрытие в границах Азии и Тихоокеанского региона, но, как ожидается, к 2020 году система станет глобальной.
Сравнение орбит спутниковых навигационных систем GPS, ГЛОНАСС, Galileo и Compass (средняя околоземная орбита — MEO) с орбитами Международной космической станции (МКС), телескопа Хаббл и серии спутников Иридиум (Iridium) на низкой орбите, а также геостационарной орбиты и номинального размера Земли.
Поддержка ГНСС
Поддержка технологи глобальных навигационных спутниковых систем (ГНСС) в электронных устройствах реализуется на базе навигационных приемников, которые могут быть выполнены в различных вариантах:
- Smart Antenna — модуль, состоящий из керамической антенны и навигационного приемника. Преимущества: компактность, не требует согласования, удешевляет разработку за счет сокращения сроков.
- MCM (Multi Chip Module) — чип, включающий все компоненты навигационного приемника.
- OEM — экранированная плата, включающая ВЧ интерфейсный процессор и процессор частот основной полосы (RF-frontend + baseband), SAW-фильтры и обвязку. Это наиболее популярное решение на данный момент.
Навигационный модуль подключается к микроконтроллеру или системе на кристалле по интерфейсу UART/RS-232 или USB.
Ключевые параметры навигационных приемников
Прежде чем навигационный приемник сможет выдавать информацию о местоположении, он должен обладать тремя наборами данных:
- Сигналы от спутников
- Альманах — информация о приблизительных параметрах орбит всех спутников, а также данные для калибровки часов и характеристики ионосферы
- Эфемериды — точные параметров орбит и часов каждого спутника
Характеристика TTFF показывает сколько времени требуется приемнику на поиск сигналов от спутников и определение местоположения. Если приёмник новый, или был выключен на протяжении длительного периода, или был перевезен на большое расстояние с момента последнего включения, время до получения набора необходимых данных и определения места увеличивается.
Производители приемников используют различные методы уменьшения TTFF, включая скачивание и сохранения альманаха и эфемерид по беспроводным сетям передачи данных (т.н. метод Assisted GPS или A-GPS), это быстрее чем извлечение этих данных из сигналов ГНСС.
Холодный старт описывает ситуацию, когда приемнику нужно получение всей информации для определения места. Это может занять до 12 минут.
Теплый старт описывает ситуацию, когда у приемника есть почти вся необходимая информация в памяти, и он определит место в течении минуты.
Одним из ключевых параметров навигационных модулей в мобильных устройствах является энергопотребление. В зависимости от режима работы модуль потребляет различное количество энергии. Фаза поиска спутников (TTFF) характеризуется большим, а слежение меньшим энергопотреблением. Также производители реализуют различные схемы уменьшения энергопотребления, например, путем периодического перевода модуля в режим сна.
Как правило, все модули выдают данные по текстовому протоколу NMEA-0183, но кроме указанного текстового протокола каждый производитель имеет свой собственный двоичный протокол (Binary), который позволяет изменять конфигурацию модуля под конкретное использование либо получать доступ к дополнительному функционалу, а также доступ к сырым измерениям. Двоичный протокол удобен для использования на микроконтроллерах, т.к. при этом нет необходимости выполнять преобразование из текста в двоичные данные, тем самым экономя программную память путем исключения библиотеки работы со строками и времени на преобразование.
Стандарт NMEA-2000 — это развитие протокола NMEA-0183. В качестве физического уровня в NMEA-2000 используется CAN-шина, которая была выбрана в виду большей защищенности по сравнению с RS-232. С точки зрения протокола передачи данныхNMEA-2000 существенно отличается от своего предшественника, т.к. использует двоичный протокол, базирующийся на стандарте SAE J1939.
Частота обновления данных о местоположении и скорости всех модулей составляет 1 Гц, но при необходимости ее можно поднять до 5 или 10 Гц.
В зависимости от области применения модуль можно сконфигурировать под определенные динамические характеристики, которые он должен отслеживать (например, максимальное ускорение объекта). Это позволяет использовать оптимальный алгоритм и улучшать качество измерений.
Для выполнения навигационной задачи модуль должен одновременно принимать сигналы от нескольких спутников, т.е. иметь несколько приемных каналов. На сегодняшний день это число лежит в диапазоне от 12 до 88.
Точность определения местоположения по GPS составляет в среднем 15 м, она обусловлена используемым неточным сигналом, влиянием атмосферы на распространение радиосигнала, качеством кварцевых генераторов в приемниках и пр. Но с помощью корректирующих методов возможно улучшить точность определения местоположения. Эта технология называется Differential GPS. Существует два метода коррекции: наземный и спутниковый DGPS.
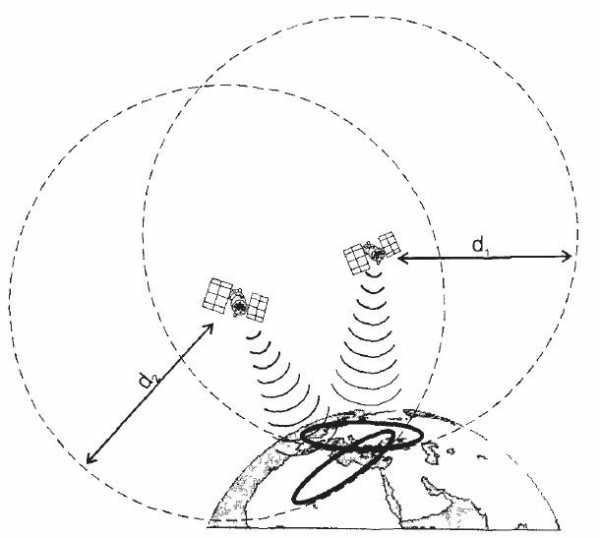
В наземных методах коррекции наземные станции дифференциальных поправок постоянно сверяют свое заведомо известное местоположение и сигналы от навигационных спутников. На базе этой информации вычисляются корректирующие величины, которые могут быть переданы с помощью УКВ- или ДВ-передатчика на мобильные DGPS-приемники в формате RTCM. На основании полученной информации потребитель может корректировать процесс определения собственного местоположения. Точность этого метода составляет 1—3 метра и зависит от расстояния до передатчика корректирующей информации и качества сигнала.
Спутниковые методы, такие как система WAAS (Wide Area Augmentation System), доступная в Северной Америке, и система EGNOS (European Geostationary Navigation Overlay System), доступная в Европе, шлют корректирующие данные с геостационарных спутников, таким образом достигается большая область приема, чем при наземных методах.
Спутниковые системы дифференциальной коррекции (SBAS — Space Based Augmentation Systems) позволяют улучшить точность, надежность и доступность навигационной системы за счет интеграции внешних данных в процессе расчета

Демонстрация принципа работы системы WAAS (Wide Area Augmentation System) на территории США
Одним из основных параметров, влияющих на точность определения местоположения и стабильность приема является чувствительность. Она, как правило, определяется качеством малошумящего усилителя на входе приемника и сложностью реализованных алгоритмов цифровой обработки. Типовые значения современных приемников лежат в диапазоне 143 дБм для поиска и 160 дБм для слежения.
Кроме определения местоположения ГНСС предоставляют информацию о точном времени. Как правило, все приемники имеют выход PPS (pulse per second, импульсов в секунду) — секундная метка (1 Гц), которая точно синхронизирована с временной шкалой UTC.
Дополнительные функции навигационных устройств
Счисление пути. На основе информации о направлении движения и пройденном пути (предоставляется дополнительными датчиками) приемник может рассчитывать свои координаты при отсутствии сигналов от спутников (например, в туннелях, на подземных стоянках и в плотной городской застройке).
Некоторые модули имеют возможность напрямую подключать флэш-память (например, по SPI) к модулю для записи трека c необходимой периодичностью. Эта функция позволяет отказаться от использования отдельного микроконтроллера, либо она может быть полезной для минимизации энергопотребления (т.е. система на кристалле может находиться в состоянии сна).
На этом поверхностный обзор технологий глобальной спутниковой навигации завершен. Спасибо за внимание. Примеры реализованных проектов на базе этих ГЛОНАСС и GPS можно посмотреть на странице разработок компании Promwad.
habr.com
Навигационные спутниковые системы мира » Военное обозрение
Многие слышали такие слова, как GPS, ГЛОНАСС, GALILEO. Большинство знает, что эти понятия означают навигационные спутниковые системы (далее — НСС).
Аббревиатура GPS относится к американской НСС NAVSTAR. Эта система была разработана для военных целей, но была использована и для решения гражданских задач — определение местоположения для воздушных, сухопутных, морских пользователей.
В Советском союзе разработка собственной НСС ГЛОНАСС была скрыта за завесой секретности. После распада СССР работы в этом направлении длительное время не велись, поэтому NAVSTAR стала единственной глобальной системой, которая применялась для определения местоположения в любой точке планеты. Но только США доступно другое предназначение этой системы – наведения оружия массового поражения на цель. И еще один не маловажный фактор – по решению военного ведомства США может быть отключен «гражданский» сигнал с американских навигационных спутников и пассажирские самолеты, корабли потеряют ориентацию. Эта монополия на управление спутниковой системой со стороны США не устраивает многие страны, включая Россию. Поэтому многие страны Россия, Индия, Япония, страны Европы, Китай, стали разрабатывать свои собственные НСС позиционирования. Все системы являются системами двойного назначения – они могут передавать два вида сигналов: для гражданских объектов и повышенной точности для военных потребителей. Основной принцип работы навигационной системы – полная автономность: система не принимает никаких сигналов от пользователей (беззапросная) и имеет высокую степень помехозащищенности и надежности.
Создание и эксплуатация любой НСС — очень сложный и дорогостоящий процесс, который из-за военной направленности должен принадлежать только государству страны-разработчика, поскольку является стратегическим видом вооружения. В случае вооруженного конфликта технология спутниковой навигации может быть использована не только для наведения оружия, но и для десантирования грузов, поддержки передвижения военных подразделений, осуществления диверсионных и разведывательных операций, что даст значительное преимущество стране, обладающей собственной технологией спутникового позиционирования.
Российская система ГЛОНАСС использует принцип определения позиции такой же, как у американской системы. В октябре 1982 года первый спутник ГЛОНАСС вышел на орбиту Земли, но в эксплуатацию система была введена только в 1993 году. Спутники российской системы беспрерывно излучают сигналы стандартной точности (СТ) — в диапазоне 1, 6 ГГц и высокой точности (ВТ) — в диапазоне 1,2 ГГц. Прием сигнала СТ доступен любому пользователю системы и обеспечивает определение горизонтальных и вертикальных координат, вектора скорости, а также времени. Например, для точного указания координат и времени необходимо принять и обработать информацию не менее, чем от четырех спутников системы ГЛОНАСС. Вся система ГЛОНАСС состоит из двадцати четырех спутников, находящихся на круговых орбитах на высоте около 19100 км. Период обращения каждого из них составляет 11 часов и 15 минут. Все спутники располагаются в трех орбитальных плоскостях — в каждой по 8 аппаратов. Конфигурация их размещения обеспечивает глобальное покрытие навигационным полем не только поверхность земли, но и околоземное пространство. В систему ГЛОНАСС входят Центр управления и сеть станций измерения и контроля, которые располагаются на всей территории России. Каждый потребитель, принимающий навигационный сигнал со спутников ГЛОГАСС, должен иметь навигационный приемник и аппаратуру обработки, позволяющей вычислить собственные координаты, время и скорость.
В настоящее время система ГЛОНАСС не обеспечивает 100% доступ к своим услугам для пользователей, но предполагает наличие трех спутников на видимом горизонте России, что по заявлению специалистов делает возможным вычислять пользователям свое местоположение. Сейчас на орбите Земли находятся спутники «ГЛОНАСС-М», но после 2015 года планируется их заменить на аппараты нового поколения — «ГЛОНАСС-К». Новый спутник будет иметь улучшенные показатели (увеличен гарантийный срок, появиться третья частота для гражданских потребителей и т.д.), аппарат будет в два раза легче — 850 кг вместо 1415 кг. Также для поддержания работоспособности всей системы потребуется только один групповой запуск «ГЛОНАСС-К» в год, что существенно снизит общие расходы. Для внедрения системы ГЛОНАСС и обеспечения ее финансирования, аппаратура этой навигационной системы устанавливается на всех вводимых в эксплуатацию транспортных средствах: самолетах, судах, наземном транспорте и т.д. Другое основное предназначение системы ГЛОНАСС — обеспечение национальной безопасности страны. Однако, по мнению экспертов, будущее российской навигационной системы не является безоблачным.
Система Galileo создается с целью обеспечения европейских потребителей самостоятельной навигационной системой — независимой, в первую очередь, от США. Финансовый источник этой программы составляет около 10 млрд. евро в год и финансируется на одну треть из бюджета, а на две трети из средств частных компаний. Система Galileo включает 30 спутников и наземные сегменты. Изначально Китай, наравне с другими 28 государствами присоединился к программе GALILEO. Россия вела переговоры по взаимодействию российской системы навигации с европейской GALILEO. Кроме европейских государств к программе GALILEO присоединились Аргентина, Малайзия, Австралия, Япония и Мексика. Планируется, что GALILEO будет передавать десять видов сигналов для предоставления следующих видов услуг: определение местоположения с точностью от 1 до 9 метров, обеспечение информацией служб спасения всех видов транспорта, предоставление услуг государственным службам, скорой помощи, пожарным, полиции, военным специалистам и службам, обеспечивающим жизнедеятельности населения. Еще одна немаловажная деталь — программа GALILEO обеспечит создание около 150 тыс. рабочих мест.
В 2006 году Индия также приняла решение о создании собственной навигационной системы IRNSS. Бюджет программы около 15 млрд. рупий. На геосинхронные орбиты планируется вывести семь спутников. Работы по развертыванию индийской системы ведет государственная компания ISRO. Все аппаратные средства системы будут разрабатываться только индийскими компаниями.
Китай, желающий занять ведущую позицию на геополитической карте мира, разработал собственную спутниковую навигационную систему «Бэйдоу» (Beidou). В сентябре 2012 года два спутника, входящие в эту систему, были успешно запущены с космодрома Сичан. Они пополнили список 15 космических аппаратов, выведенных китайскими специалистами на околоземную орбиту в рамках создания полноценной спутниковой навигационной системы.
Реализация программы началась китайскими разработчиками еще в 2000 году с запуска двух спутников. Уже в 2011 году на орбите находилось 11 спутников, и система вошла в стадию экспериментальной эксплуатации.
Развертывание собственной навигационной спутниковой системы позволит Китаю не зависеть от крупнейших мировых систем американской (GPS) и российской (ГЛОНАСС). Это повысит эффективность китайских отраслей экономики, особенно, таких, которые связаны с телекоммуникациями.
Планируется, что к 2020 году в китайской НСС будет задействовано около 35 спутников, и тогда система «Бэйдоу» сможет контролировать весь земной шар. Китайская НСС предусматривает следующие виды услуг: определение местоположения с точностью до 10 м, скорости до 0,2 м/с и времени до 50 нс. Особенный круг пользователей будет иметь доступ к более точным параметрам измерений. Китай готов на взаимодействие с другими странами по разработке и эксплуатации спутниковой навигации. Китайская система «Бэйдоу» полностью совместима с европейской Galileo, российской ГЛОНАСС и американской GPS.
«Бэйдоу» эффективно применяется при подготовке прогнозов погоды, предупреждении стихийных бедствий, в области транспорта наземного, воздушного и морского, а также геологоразведке.
В планах Китая постоянное усовершенствование своей спутниковой навигационной системы. Увеличение количества спутников позволит расширить зону обслуживания всего азиатско-тихоокеанского региона.
Использованы материалы:
http://www.odnako.org/blogs/show_20803/
http://www.masters.donntu.edu.ua/2004/ggeo/mikhedov/diss/libruary/mark.htm
http://overseer.com.ua/about_glonass.html
http://4pda.ru/2010/03/16/21851/
http://expert.com.ua/57706-galileo-%D0%BE%D0%B1%D0%BE%D0%B9%D0%B4%D1%91%D1%82%D1%81%D1%8F-%D0%B5%D0%B2%D1%80%D0%BE%D1%81%D0%BE%D1%8E%D0%B7%D1%83-%D0%BD%D0%B0%D0%BC%D0%BD%D0%BE%D0%B3%D0%BE-%D0%B4%D0%BE%D1%80%D0%BE%D0%B6%D0%B5.html
topwar.ru